Indien dit uw eerste bezoek is, check dan eerst de FAQ door op bovenstaande
link te klikken. Mogelijk moet u register
vooraleer u kan posten: klik op de 'registreren'-link hierboven om verder te gaan. Om berichten te lezen kiest u het forum dat u wenst te bezoeken in bovenstaande lijst.
oh nee, fcapri is niet meer. die is lang verdwenen nu. zal jullie wel opgevallen zijn dat geenenkele van mijn nieuwe projectjes hier voorgesteld zijn ;-).
ik kom hier 'heeel af en toe' eens rap wat rondlezen als ik niks beters te doen heb. of als ik mijn oude naam ergens opmerk.
ackerman, reverse-ackerman, pro-ackerman zijn allemaal TE ingewikkelde zaken om hier snel neer te schrijven hoor.
en de rechte van kamm... die ken ik niet. ken wel zijne cirkel een beetje, en de berekingen van de krachten, maar verder is dat te ingewikkeld.
ackerman is nog makkelijk uit te leggen. als je een bocht neemt, dan moet je binnenwiel een kortere bocht nemen dan de buitenbocht. dit doen ze door je stuurstangen onder een hoek aan je voorwielen te hangen.
(kijk eens naar een mercedes als die parkeerd, één van die wielen valt bijna uit de wielkast, zo scheef draaien die).
de hoek valt samen op je achteras (het toeval wil dat ik zelf een ligfiets met 3wielen bouw en net weer ingelezen ben in die info). hoe je dat moet maken, moet je zelf eens nalezen online
reverse ackerman doet het omgekeerd, ze gaan het binnenwiel de verkeerde kant uit laten gaan. hierdoor kan je minder scherp afdraaien (je wielen slippen), maar als je een wijdere bocht neemt, kan je wel veel sneller de bocht door. de reden daar zou het gewicht op het binnenwiel zijn. doordat daar minder gewicht zit als je in de bocht gaat, verliest het al grip. dus ipv van ervoor te zorgen dat het wiel niet slipt, en je trager moet rijden (cirkel van kamm), gaat ze het de andere kant uitsturen zodat het wel slipt en daarbij gaan ze de draaicirkel vergroten zodat je sneller kan zonder eruit te schuiven.
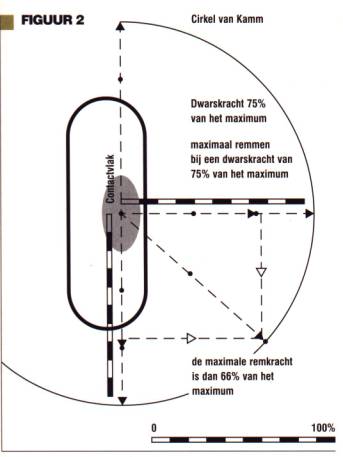
de cirkel van kamm is ook een leuke. daar wordt een cirkel om je wiel getrokken en elk kracht (optrekken, afremmen, afdraaien) wordt daar voorgesteld door een pijl. hoe meer kracht, hoe langer de pijl. komt de pijl buiten die cirkel, verlies je grip. zo kan je maximaal remmen als je rechtuit gaat, maar in een bocht mag je zo hard niet remmen omdat die 2 pijlen gecombineerd worden (zie onderste tekening. als ze daar nog iets meer remmen, of afdraaien, komt die rode pijl erbuiten en schuift ge het decor in)
als je afremt en draait, moet je die 2pijlen combineren. ik vermoed dat ze daarmee die rechte van kamm bedoelen? door het ackerman principe gaat één der wielen onder een andere hoek staan (zie eerste tekening). beide wielen remmen evenveel, maar eentje draait meer af dan de andere, dus een kan nog net binnen de cirkel zitten, de andere gaat eruit.
voor de rest kan ik die 'rechte van kamm' niet thuisbrengen
die auto van mij toont zo'n kamm cirkel (of circle of traction) als je dat wilt. Als je denkt dat je de limiet bereikt hebt in het bochtenwerk, blijkt dat vaak niet zo te zijn...
die auto van mij toont zo'n kamm cirkel (of circle of traction) als je dat wilt. Als je denkt dat je de limiet bereikt hebt in het bochtenwerk, blijkt dat vaak niet zo te zijn...
het is dan ook veel theorie diene cirkel. de grootte van diene cirkel (hoe ver je mag gaan dus), hangt af van de bandensamenstelling, bandendruk, weeromstandigheden, soort asfalt....
allemaal leuk als ze zo een schermpje in de auto geven met die info, maar accuraat kan het nooit zijn.
terwijl je op 1soort asfalt zou wegschuiven als je een bepaalde bocht aan bepaalde snelheid neemt, kan je bij de andere perfect grip behouden. dat display kan zoiets niet zien.
voor de rest komt er VEEEL MEEER bij kijken. ik dacht ook ff, bwa, moeilijk zal da niet zijn, 2 sturende voorwielen (de 2de foto van mijn bovenste post komt namelijk uit de website dat ik aan het lezen was).
maar man,.... k heb da 2keer moeten lezen en ben nog niet mee. mijn prototype zal er ene worden met een heleboel boutjes zodat ik 10keer kan bijregelen. no way dat ik dat in 1keer goed gelast krijg.
Although Ackerman steering compensation is a requirement, it can make the steering sensitive, leading to over-steering at high speeds. As a way to make the steering less sensitive, an Anti-Ackerman is used. An Anti-Ackerman is actually a partially compensated Arckerman implementation and allows a small amount of scrubbing when turning. Although this Anti-Ackerman slows the vehicles into corners, it does allow the trike to sustain faster speeds without steering instability. My personal T'bolt can sustain speeds greater than 50 MPH without steering instability, as it uses a 2° Anti-Ackerman offset.
en hoe hij die 2° anti-ackermann maakt: op mijn 2de foto van de vorige post, komt die 2 lijnen van de 'control arms' samen aan de achteras. als ge die laat samen kopen 10cm meer naar achteren, hebt ge anti-ackermann
de hoek van uw veerpoten tov de auto, zowel zijdelings als van de voorkant bekeken.
de hoek van de naaf tov de veerpoten (voorpoten staan schuin naar voor en schuin naar binnen)
de hoek van de naaf tov de auto
de positie van de as tov de veerpoten (de veerpoot zit VOOR de as)
de hoek van je wielnaaf waar je stuurhuisfusee in zit, de lengte van het stuurhuis...
k heb ondervonden dat de ontwerper van mijn auto slimmer was dan ik , en ik daar weinig kan aan verbeteren (heb ik geleerd nadat ik zelf een voorophanging aan het ontwerpen ben voor een iets eenvoudiger voertuig).
ik lees dat ook maar hoor, ik ben niet met die kennis geboren. erin geintresseerd zijn en er meer willen over weten, is het goeie begin
het is dan ook veel theorie diene cirkel. de grootte van diene cirkel (hoe ver je mag gaan dus), hangt af van de bandensamenstelling, bandendruk, weeromstandigheden, soort asfalt....
allemaal leuk als ze zo een schermpje in de auto geven met die info, maar accuraat kan het nooit zijn.
terwijl je op 1soort asfalt zou wegschuiven als je een bepaalde bocht aan bepaalde snelheid neemt, kan je bij de andere perfect grip behouden. dat display kan zoiets niet zien.
Meer moet je niet weten, hoeveel dwarskracht en hoeveel in lengterichting. De rest moet van de chauffeur (of als je wilt "piloot") komen. De data zijn best accuraat, dezelfde gegevens worden door het ESP gebruikt.
Nu moet ge u nog bezig houden met roll centers....
 Tweet
Tweet







Comment